Note
Go to the end to download the full example code
Matrix-free second-order optimization
This example walks you through a second-order optimizer that uses the conjugate gradient (CG) method and matrix-free multiplication with the block diagonal of different curvature matrices to solve for the Newton step.
The optimizer is tested on the classic MNIST example from PyTorch. In particular, we will use a model that suffers from the vanishing gradient problem and is hence difficult to optimizer for gradient descent. Second-order methods are less affected by that issue and can train these models, as they rescale the gradient according to the local curvature.
A local quadratic model of the loss defined by a curvature matrix \(C(x_t)\) (the Hessian, generalized Gauss-Newton, or other approximations)is minimized by taking the Newton step
where
Let’s get the imports, configuration and some helper functions out of the way first. Notice that we are choosing a net with many sigmoids to make it hard to train for SGD.
Note
Larger batch sizes are usually recommended for second-order methods. However, the memory constraints imposed by the architecture used to build this example restrict us to rather small values.
import math
import matplotlib.pyplot as plt
import torch
from backpack import backpack, extend, extensions
from backpack.utils.examples import get_mnist_dataloader
BATCH_SIZE = 64
LR = 0.1
DAMPING = 1e-2
CG_TOL = 0.1
CG_ATOL = 1e-6
CG_MAX_ITER = 20
MAX_ITER = 50
PRINT_EVERY = 10
DEVICE = torch.device("cuda:0" if torch.cuda.is_available() else "cpu")
torch.manual_seed(0)
mnist_loader = get_mnist_dataloader(batch_size=BATCH_SIZE)
def make_model():
return torch.nn.Sequential(
torch.nn.Conv2d(1, 10, 5, 1),
torch.nn.Sigmoid(),
torch.nn.MaxPool2d(2, 2),
torch.nn.Conv2d(10, 20, 5, 1),
torch.nn.Sigmoid(),
torch.nn.MaxPool2d(2, 2),
torch.nn.Flatten(),
torch.nn.Linear(4 * 4 * 20, 50),
torch.nn.Sigmoid(),
torch.nn.Linear(50, 10),
)
model = make_model().to(DEVICE)
loss_function = torch.nn.CrossEntropyLoss().to(DEVICE)
def get_accuracy(output, targets):
"""Helper function to print the accuracy"""
predictions = output.argmax(dim=1, keepdim=True).view_as(targets)
return predictions.eq(targets).float().mean().item()
Writing the optimizer
To compute the update, we need access to the curvature matrix in form of matrix-vector products. We can then solve the linear system implied by the Newton step with CG,
and perform the update
for every parameter.
Here is the optimizer. At its core is a simple implementation of CG that
will iterate until the residual norm decreases a certain threshold (determined
the atol and tol arguments), or exceeds a maximum budget (maxiter).
class CGNOptimizer(torch.optim.Optimizer):
def __init__(
self,
parameters,
bp_extension,
lr=0.1,
damping=1e-2,
maxiter=100,
tol=1e-1,
atol=1e-8,
):
super().__init__(
parameters,
dict(
lr=lr,
damping=damping,
maxiter=maxiter,
tol=tol,
atol=atol,
savefield=bp_extension.savefield,
),
)
self.bp_extension = bp_extension
def step(self):
for group in self.param_groups:
for p in group["params"]:
damped_curvature = self.damped_matvec(
p, group["damping"], group["savefield"]
)
direction, info = self.cg(
damped_curvature,
-p.grad.data,
maxiter=group["maxiter"],
tol=group["tol"],
atol=group["atol"],
)
p.data.add_(direction, alpha=group["lr"])
def damped_matvec(self, param, damping, savefield):
curvprod_fn = getattr(param, savefield)
def matvec(v):
v = v.unsqueeze(0)
result = damping * v + curvprod_fn(v)
return result.squeeze(0)
return matvec
@staticmethod
def cg(A, b, x0=None, maxiter=None, tol=1e-5, atol=1e-8):
r"""Solve :math:`Ax = b` for :math:`x` using conjugate gradient.
The interface is similar to CG provided by :code:`scipy.sparse.linalg.cg`.
The main iteration loop follows the pseudo code from Wikipedia:
https://en.wikipedia.org/w/index.php?title=Conjugate_gradient_method&oldid=855450922
Parameters
----------
A : function
Function implementing matrix-vector multiplication by `A`.
b : torch.Tensor
Right-hand side of the linear system.
x0 : torch.Tensor
Initialization estimate.
atol: float
Absolute tolerance to accept convergence. Stop if
:math:`|| A x - b || <` `atol`
tol: float
Relative tolerance to accept convergence. Stop if
:math:`|| A x - b || / || b || <` `tol`.
maxiter: int
Maximum number of iterations.
Returns
-------
x (torch.Tensor): Approximate solution :math:`x` of the linear system
info (int): Provides convergence information, if CG converges info
corresponds to numiter, otherwise info is set to zero.
"""
maxiter = b.numel() if maxiter is None else min(maxiter, b.numel())
x = torch.zeros_like(b) if x0 is None else x0
# initialize parameters
r = (b - A(x)).detach()
p = r.clone()
rs_old = (r**2).sum().item()
# stopping criterion
norm_bound = max([tol * torch.norm(b).item(), atol])
def converged(rs, numiter):
"""Check whether CG stops (convergence or steps exceeded)."""
norm_converged = norm_bound > math.sqrt(rs)
info = numiter if norm_converged else 0
iters_exceeded = numiter > maxiter
return (norm_converged or iters_exceeded), info
# iterate
iterations = 0
while True:
Ap = A(p).detach()
alpha = rs_old / (p * Ap).sum().item()
x.add_(p, alpha=alpha)
r.sub_(Ap, alpha=alpha)
rs_new = (r**2).sum().item()
iterations += 1
stop, info = converged(rs_new, iterations)
if stop:
return x, info
p.mul_(rs_new / rs_old)
p.add_(r)
rs_old = rs_new
Running and plotting
Let’s try the Newton-style CG optimizer with the generalized Gauss-Newton (GGN) as curvature matrix.
After extend-ing the model and the loss function and creating the optimizer,
we have to add the curvature-matrix product extension to the with backpack(...)
context in a backward pass, such that the optimizer has access to the GGN product.
The rest is just a canonical training loop which logs and visualizes training
loss and accuracy.
model = extend(model)
loss_function = extend(loss_function)
optimizer = CGNOptimizer(
model.parameters(),
extensions.GGNMP(),
lr=LR,
damping=DAMPING,
maxiter=CG_MAX_ITER,
tol=CG_TOL,
atol=CG_ATOL,
)
losses = []
accuracies = []
for batch_idx, (x, y) in enumerate(mnist_loader):
optimizer.zero_grad()
x, y = x.to(DEVICE), y.to(DEVICE)
outputs = model(x)
loss = loss_function(outputs, y)
with backpack(optimizer.bp_extension):
loss.backward()
optimizer.step()
# Logging
losses.append(loss.detach().item())
accuracies.append(get_accuracy(outputs, y))
if (batch_idx % PRINT_EVERY) == 0:
print(
"Iteration %3.d/%3.d " % (batch_idx, MAX_ITER)
+ "Minibatch Loss %.5f " % losses[-1]
+ "Accuracy %.5f" % accuracies[-1]
)
if MAX_ITER is not None and batch_idx > MAX_ITER:
break
fig = plt.figure()
axes = [fig.add_subplot(1, 2, 1), fig.add_subplot(1, 2, 2)]
axes[0].plot(losses)
axes[0].set_title("Loss")
axes[0].set_xlabel("Iteration")
axes[1].plot(accuracies)
axes[1].set_title("Accuracy")
axes[1].set_xlabel("Iteration")
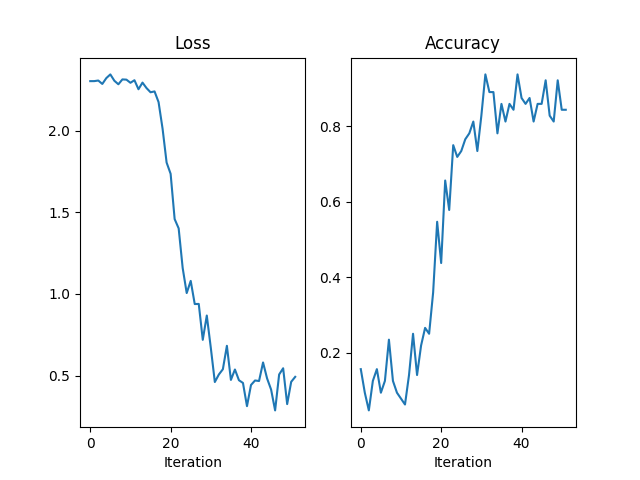
Iteration 0/ 50 Minibatch Loss 2.30490 Accuracy 0.15625
Iteration 10/ 50 Minibatch Loss 2.29479 Accuracy 0.07812
Iteration 20/ 50 Minibatch Loss 1.73662 Accuracy 0.43750
Iteration 30/ 50 Minibatch Loss 0.66947 Accuracy 0.82812
Iteration 40/ 50 Minibatch Loss 0.44190 Accuracy 0.87500
Iteration 50/ 50 Minibatch Loss 0.46134 Accuracy 0.84375
Text(0.5, 23.52222222222222, 'Iteration')
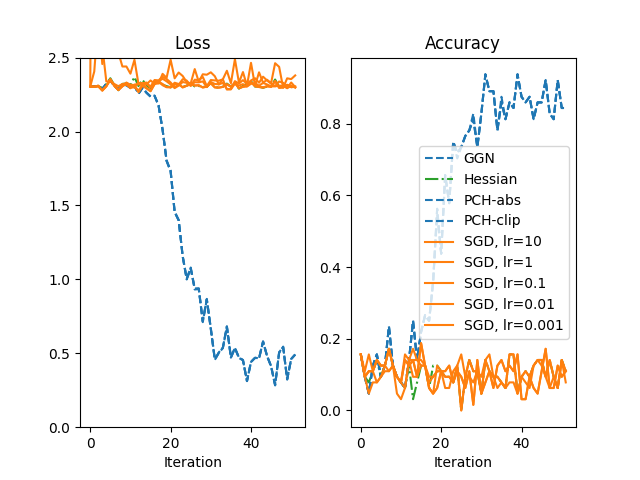
Vanishing gradients: comparison with SGD
By intention, we chose a model that is different to optimize with gradient descent due to the large number of sigmoids that reduce the gradient signal in backpropagation.
To verify that, let’s compare the Newton optimizer for different curvatures with SGD.
SGD is run for a large range of learning rates lr ∈ [10, 1, 0.1, 0.01, 0.001].
The performance of CG-Newton versus SGD is shown below (using a somewhat simplified color scheme to simplify the visualization).
def make_cgn_optimizer_fn(extension):
def optimizer_fn(model):
return CGNOptimizer(
model.parameters(),
extension,
lr=LR,
damping=DAMPING,
maxiter=CG_MAX_ITER,
tol=CG_TOL,
atol=CG_ATOL,
)
return optimizer_fn
curvatures = [
extensions.GGNMP(),
extensions.HMP(),
extensions.PCHMP(modify="abs"),
extensions.PCHMP(modify="clip"),
]
labels = [
"GGN",
"Hessian",
"PCH-abs",
"PCH-clip",
]
optimizers = []
for curvature in curvatures:
optimizers.append(make_cgn_optimizer_fn(curvature))
def make_sgd_optimizer_fn(lr):
def optimizer_fn(model):
return torch.optim.SGD(model.parameters(), lr=lr)
return optimizer_fn
sgd_lrs = [
10,
1,
0.1,
0.01,
0.001,
]
for lr in sgd_lrs:
optimizers.append(make_sgd_optimizer_fn(lr))
labels.append("SGD, lr={}".format(lr))
def train(optim_fn):
torch.manual_seed(0)
mnist_loader = get_mnist_dataloader(batch_size=BATCH_SIZE)
model = make_model().to(DEVICE)
loss_function = torch.nn.CrossEntropyLoss().to(DEVICE)
optimizer = optim_fn(model)
need_backpack = isinstance(optimizer, CGNOptimizer)
if need_backpack:
model = extend(model)
loss_function = extend(loss_function)
losses = []
accuracies = []
for batch_idx, (x, y) in enumerate(mnist_loader):
optimizer.zero_grad()
x, y = x.to(DEVICE), y.to(DEVICE)
outputs = model(x)
loss = loss_function(outputs, y)
if need_backpack:
with backpack(optimizer.bp_extension):
loss.backward()
else:
loss.backward()
optimizer.step()
# Logging
losses.append(loss.detach().item())
accuracies.append(get_accuracy(outputs, y))
if (batch_idx % PRINT_EVERY) == 0:
print(
"Iteration %3.d/%3.d " % (batch_idx, MAX_ITER)
+ "Minibatch Loss %.5f " % losses[-1]
+ "Accuracy %.5f" % accuracies[-1]
)
if MAX_ITER is not None and batch_idx > MAX_ITER:
break
return losses, accuracies
fig = plt.figure()
axes = [fig.add_subplot(1, 2, 1), fig.add_subplot(1, 2, 2)]
axes[0].set_title("Loss")
axes[0].set_ylim(0, 2.5)
axes[0].set_xlabel("Iteration")
axes[1].set_title("Accuracy")
axes[1].set_xlabel("Iteration")
for optim_fn, label in zip(optimizers, labels):
print(label)
losses, accuracies = train(optim_fn)
if "SGD" in label:
axes[0].plot(losses, "-", color="tab:orange", label=label)
axes[1].plot(accuracies, "-", color="tab:orange", label=label)
elif "Hessian" in label:
axes[0].plot(losses, "-.", color="tab:green", label=label)
axes[1].plot(accuracies, "-.", color="tab:green", label=label)
else:
axes[0].plot(losses, "--", color="tab:blue", label=label)
axes[1].plot(accuracies, "--", color="tab:blue", label=label)
plt.legend()
GGN
Iteration 0/ 50 Minibatch Loss 2.30490 Accuracy 0.15625
Iteration 10/ 50 Minibatch Loss 2.29479 Accuracy 0.07812
Iteration 20/ 50 Minibatch Loss 1.73662 Accuracy 0.43750
Iteration 30/ 50 Minibatch Loss 0.66947 Accuracy 0.82812
Iteration 40/ 50 Minibatch Loss 0.44190 Accuracy 0.87500
Iteration 50/ 50 Minibatch Loss 0.46134 Accuracy 0.84375
Hessian
Iteration 0/ 50 Minibatch Loss 2.30490 Accuracy 0.15625
Iteration 10/ 50 Minibatch Loss 2.31362 Accuracy 0.07812
Iteration 20/ 50 Minibatch Loss 2.29901 Accuracy 0.10938
Iteration 30/ 50 Minibatch Loss 2.33037 Accuracy 0.04688
Iteration 40/ 50 Minibatch Loss 2.34091 Accuracy 0.09375
Iteration 50/ 50 Minibatch Loss 2.30108 Accuracy 0.14062
PCH-abs
Iteration 0/ 50 Minibatch Loss 2.30490 Accuracy 0.15625
Iteration 10/ 50 Minibatch Loss 2.29477 Accuracy 0.07812
Iteration 20/ 50 Minibatch Loss 1.73104 Accuracy 0.43750
Iteration 30/ 50 Minibatch Loss 0.66266 Accuracy 0.82812
Iteration 40/ 50 Minibatch Loss 0.44060 Accuracy 0.87500
Iteration 50/ 50 Minibatch Loss 0.46045 Accuracy 0.84375
PCH-clip
Iteration 0/ 50 Minibatch Loss 2.30490 Accuracy 0.15625
Iteration 10/ 50 Minibatch Loss 2.29477 Accuracy 0.07812
Iteration 20/ 50 Minibatch Loss 1.73137 Accuracy 0.43750
Iteration 30/ 50 Minibatch Loss 0.66707 Accuracy 0.82812
Iteration 40/ 50 Minibatch Loss 0.44206 Accuracy 0.87500
Iteration 50/ 50 Minibatch Loss 0.46254 Accuracy 0.84375
SGD, lr=10
Iteration 0/ 50 Minibatch Loss 2.30490 Accuracy 0.15625
Iteration 10/ 50 Minibatch Loss 2.39131 Accuracy 0.03125
Iteration 20/ 50 Minibatch Loss 2.48565 Accuracy 0.10938
Iteration 30/ 50 Minibatch Loss 2.40048 Accuracy 0.09375
Iteration 40/ 50 Minibatch Loss 2.46472 Accuracy 0.09375
Iteration 50/ 50 Minibatch Loss 2.35458 Accuracy 0.14062
SGD, lr=1
Iteration 0/ 50 Minibatch Loss 2.30490 Accuracy 0.15625
Iteration 10/ 50 Minibatch Loss 2.29233 Accuracy 0.07812
Iteration 20/ 50 Minibatch Loss 2.30193 Accuracy 0.10938
Iteration 30/ 50 Minibatch Loss 2.32728 Accuracy 0.04688
Iteration 40/ 50 Minibatch Loss 2.33464 Accuracy 0.09375
Iteration 50/ 50 Minibatch Loss 2.29963 Accuracy 0.14062
SGD, lr=0.1
Iteration 0/ 50 Minibatch Loss 2.30490 Accuracy 0.15625
Iteration 10/ 50 Minibatch Loss 2.29734 Accuracy 0.07812
Iteration 20/ 50 Minibatch Loss 2.29772 Accuracy 0.10938
Iteration 30/ 50 Minibatch Loss 2.32725 Accuracy 0.04688
Iteration 40/ 50 Minibatch Loss 2.33309 Accuracy 0.09375
Iteration 50/ 50 Minibatch Loss 2.30046 Accuracy 0.14062
SGD, lr=0.01
Iteration 0/ 50 Minibatch Loss 2.30490 Accuracy 0.15625
Iteration 10/ 50 Minibatch Loss 2.31147 Accuracy 0.07812
Iteration 20/ 50 Minibatch Loss 2.31855 Accuracy 0.10938
Iteration 30/ 50 Minibatch Loss 2.33472 Accuracy 0.04688
Iteration 40/ 50 Minibatch Loss 2.32270 Accuracy 0.03125
Iteration 50/ 50 Minibatch Loss 2.31044 Accuracy 0.09375
SGD, lr=0.001
Iteration 0/ 50 Minibatch Loss 2.30490 Accuracy 0.15625
Iteration 10/ 50 Minibatch Loss 2.31588 Accuracy 0.07812
Iteration 20/ 50 Minibatch Loss 2.33159 Accuracy 0.10938
Iteration 30/ 50 Minibatch Loss 2.34831 Accuracy 0.04688
Iteration 40/ 50 Minibatch Loss 2.34534 Accuracy 0.03125
Iteration 50/ 50 Minibatch Loss 2.33162 Accuracy 0.09375
<matplotlib.legend.Legend object at 0x7efe42e182e0>
While SGD is not capable to train this particular model, the second-order methods are still able to do so. Such methods may be interesting for optimization tasks that first-order methods struggle with.
Note that the Hessian of the net is not positive semi-definite. In this case, the local quadratic model does not have a global minimum and that complicates the usage of the Hessian in second-order optimization. This also provides a motivation for the other positive semi-definite Hessian approximations shown here.
Total running time of the script: (1 minutes 10.474 seconds)